On-going Projects
Validation of logistics process in CDC automation logistics center
(LG CNS)

With the shift towards multi-variety small-batch production, agility in production and customization for customers is being emphasized. The necessity of automation technology is being highlighted.
Automated warehouses, by integrating robots, unmanned conveyor systems, and automated storage facilities, can achieve high productivity.
The operational policies of automated facilities play a crucial role in the productivity of automated warehouses.
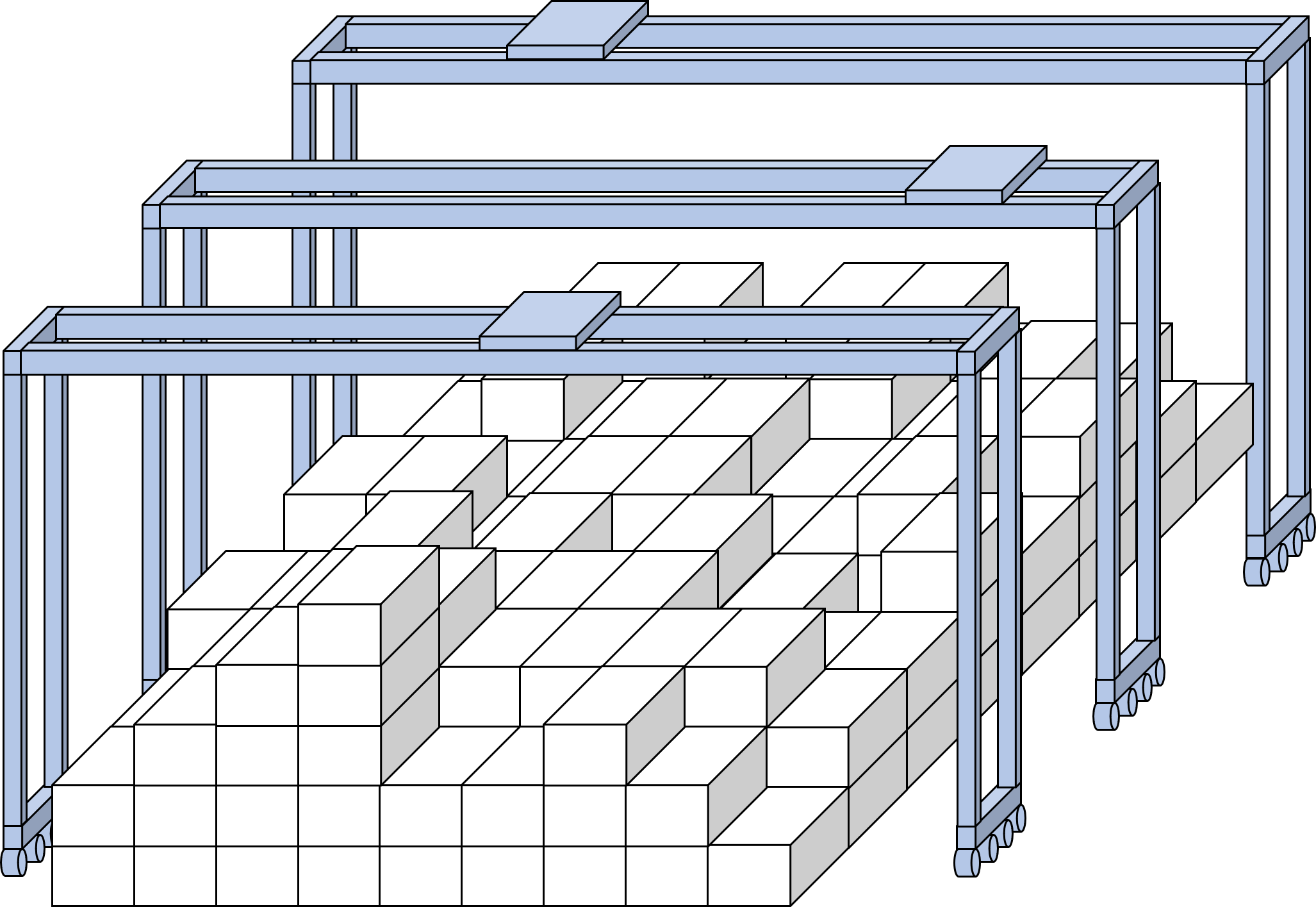
A Central Distribution Center (CDC) differs from typical warehouses in that it generates and dispatches mixed SKU pallets from single SKU pallets.
To enhance the productivity of CDCs in such scenarios and reduce human intervention, research is being conducted by dividing the inbound process and mixed process, employing ongoing and analytical approaches.
(2023 ~ present)